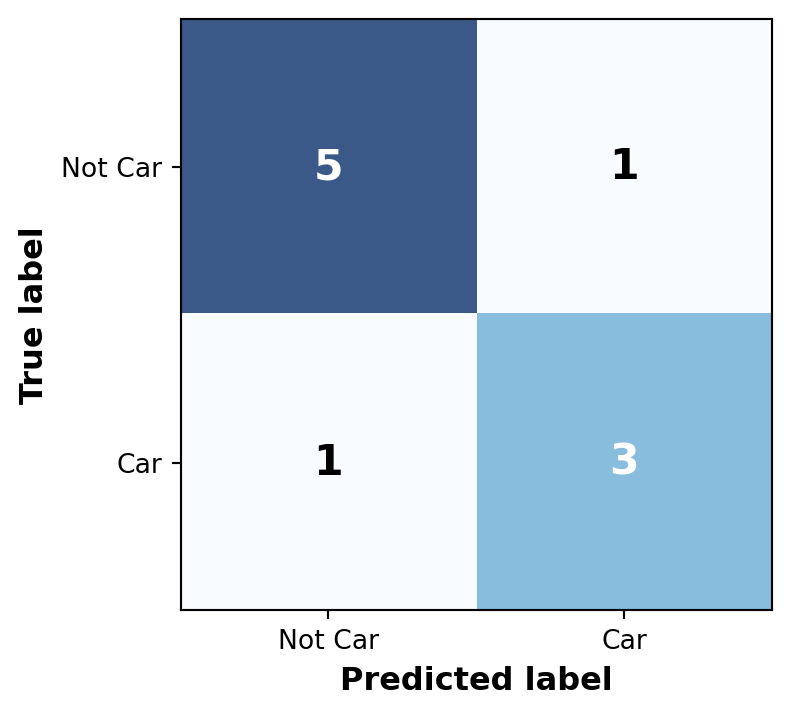
Accuracy : 0.80
Precision: 0.75
Recall : 0.75Evaluation & Deployment
2026-03-13
Accuracy : 0.80
Precision: 0.75
Recall : 0.75
Matrix Layout:
Step 1: Gather We take every “Car” prediction the model made across the whole test set.
Step 2: Sort We sort them from highest confidence (e.g., \(0.99\)) to lowest (e.g., \(0.10\)).
Step 3: Calculate We calculate Precision and Recall at every single step of that sorted list.
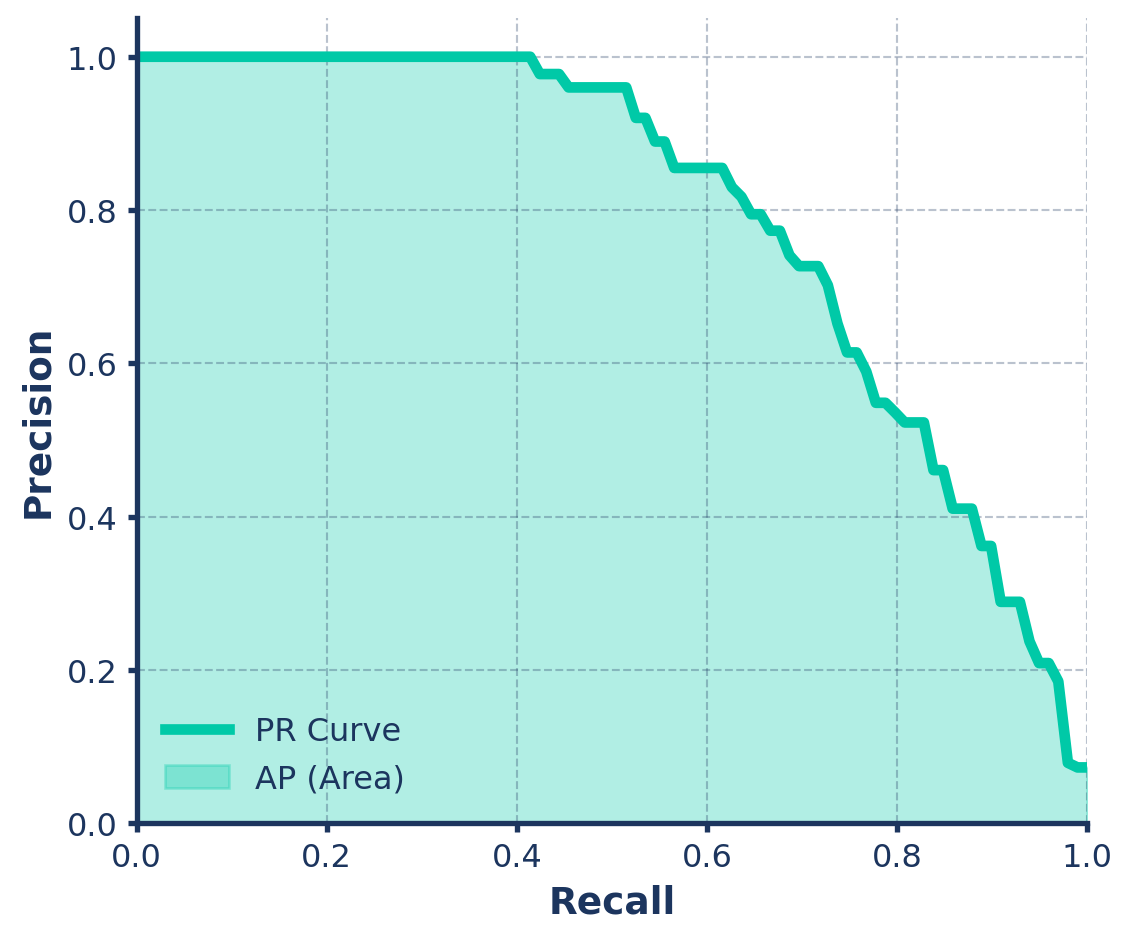
Average Precision (AP) is simply the area under this Precision-Recall (PR) curve!
How perfectly does the predicted bounding box overlap the ground truth box?
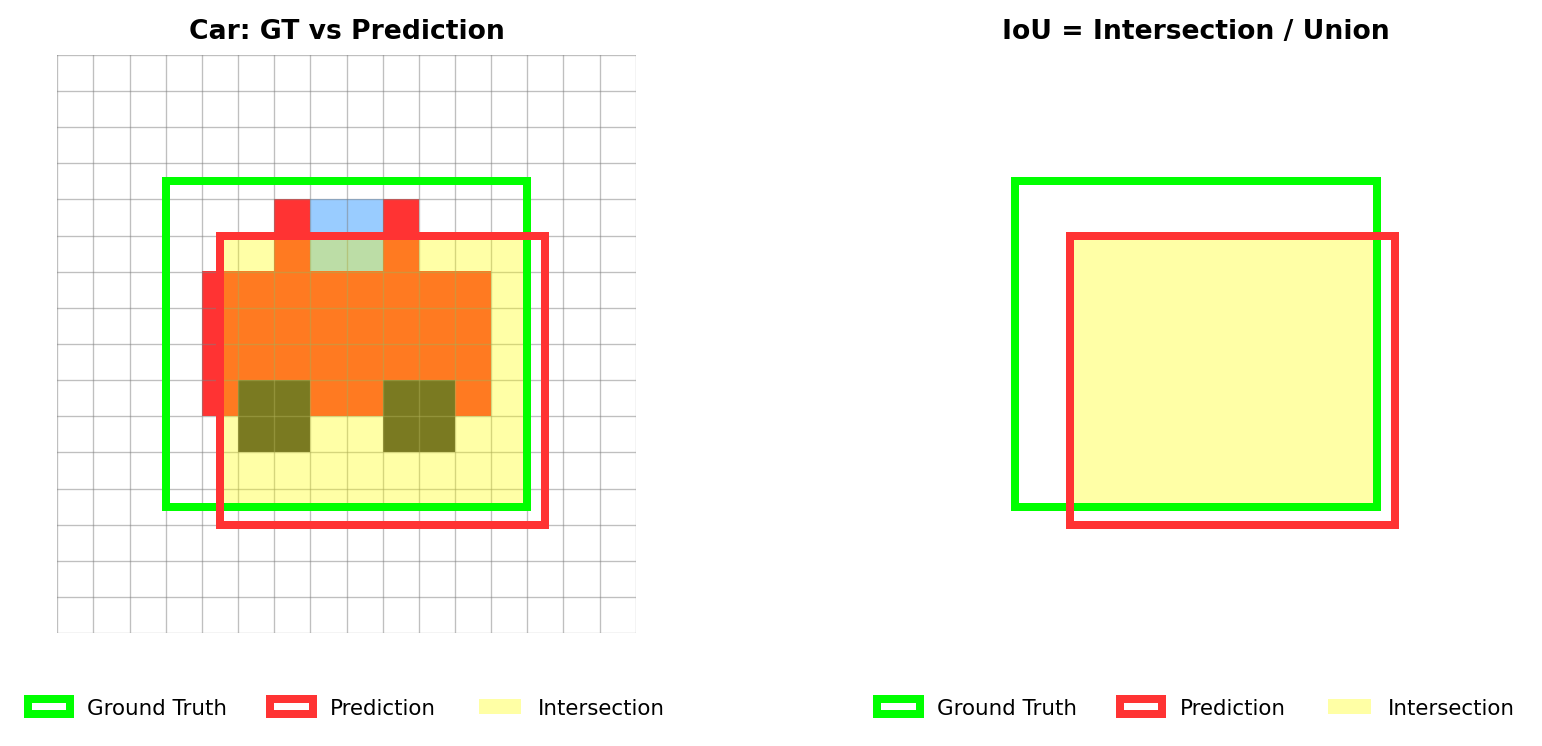
Rule of Thumb: A prediction is typically considered a “True Positive” (correct) if the IoU is > 0.50.
A common question is: “What if the model predicts multiple boxes for the exact same object?”
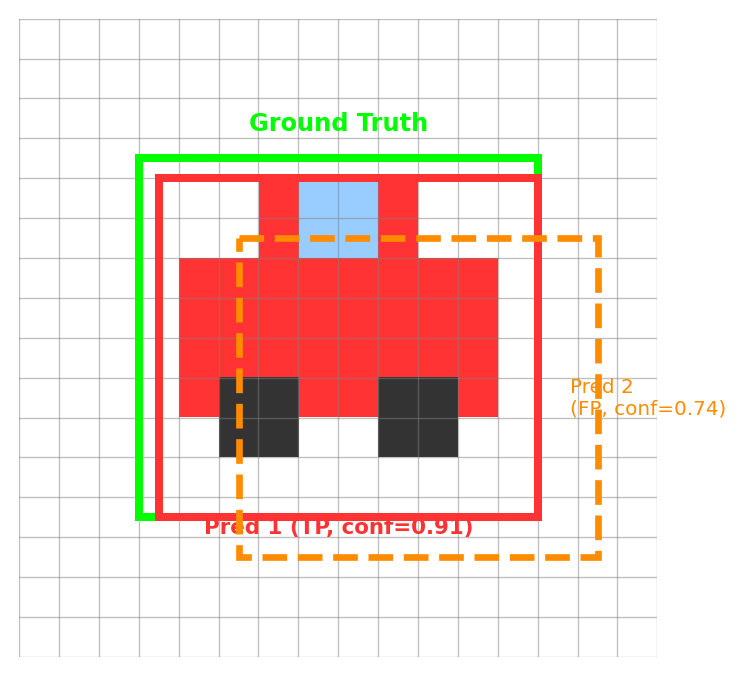
Rule: One Ground Truth = Only One TP
