Digital Image Foundations
How computers perceive images
2026-03-13
How We See: Light and The Human Eye
- 1. Illumination: Light from a source (e.g., the sun) hits an object.
- 2. Reflection: The object absorbs some colors and reflects others.
- 3. Capture: Reflected light enters the eye through the pupil.
- 4. Processing: The lens focuses light onto the retina. Photoreceptors (rods and cones) convert it to electrical signals for the brain.

How Computers “See”: The Digital Camera
- 1. Capture: Just like the eye, the camera captures reflected light.
- 2. Lens & Aperture: Light enters through an opening (aperture) and is focused by glass lenses.
- 3. The Sensor: Instead of a retina, light hits a digital sensor (CMOS/CCD).
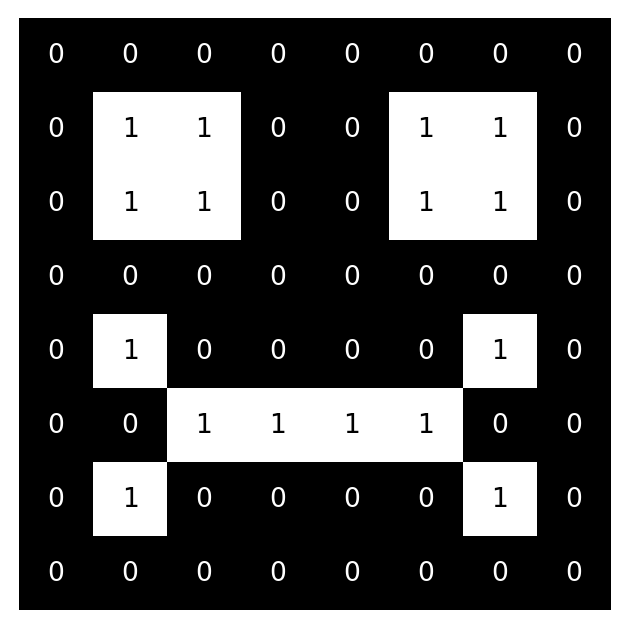
- 4. Digitization: Millions of sensor pixels convert incoming photons into an electrical charge, which is translated into a digital matrix.

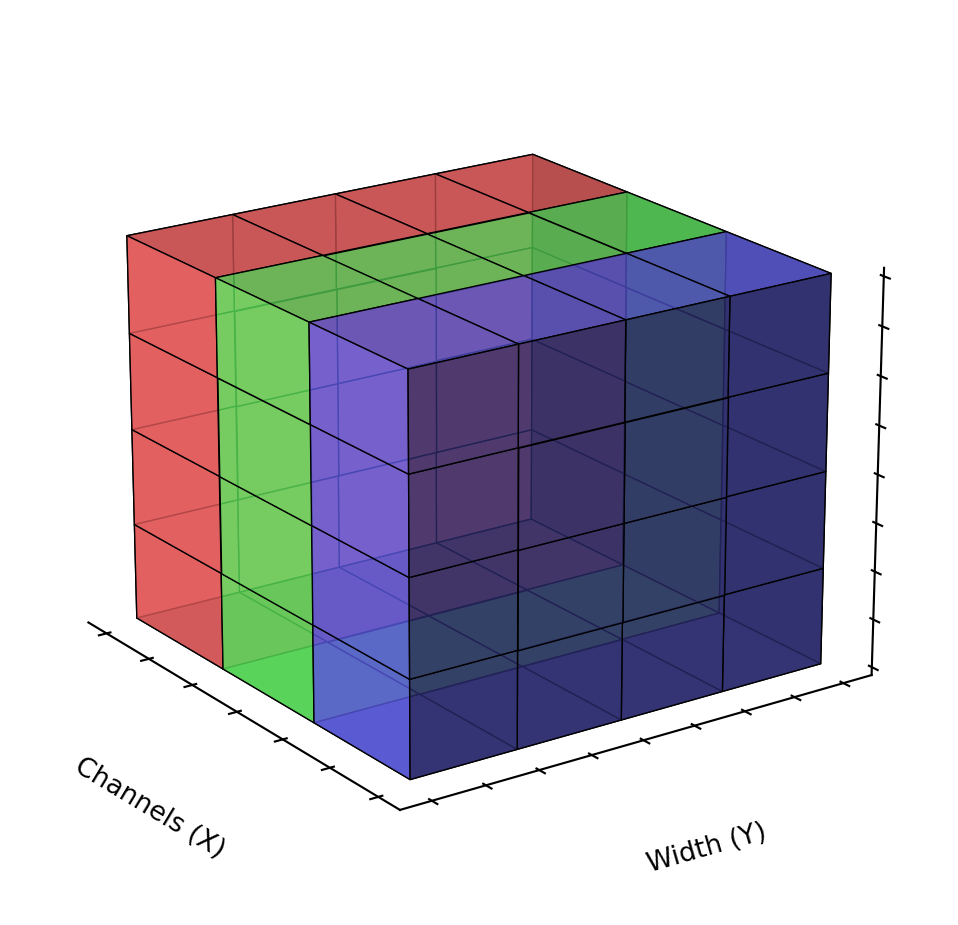
Color Images: The RGB Channels
- Images are 3D matrices (height × width × 3 channels).
- RGB: Red, Green, Blue. Values range from
0(dark) to255(bright).